
 Experimento demorou dois anos até esta fase. (Foto: Reprodução/FIFA).
Experimento demorou dois anos até esta fase. (Foto: Reprodução/FIFA).
O jovem paraplégico Juliano Pinto, 29 anos, vestindo um exoesqueleto robótico, foi o responsável por dar chute de inauguração da Copa do Mundo de Futebol no Brasil. O feito é um grande marco na ciência e foi um dos destaques da abertura da Copa do Mundo de Futebol, nesta quinta (12) em São Paulo, no estádio Arena Corinthians.
A iniciativa foi comandada pelo neurocientista brasileiro Miguel Nicolelis e era bastante aguardada há mais de dois anos. O projeto "Andar de Novo" é financiado pela Finep, empresa pública do Ministério da Ciência, Tecnologia e Inovação (MCTI), no valor de R$ 33 milhões. A construção do traje foi feito através de um consórcio formado por centenas de pessoas de universidades e institutos de pesquisa de 25 países, comandado por Nicolelis. No Brasil, a coordenação ficou com o Instituto Internacional de Neurociências de Natal (IINN-ELS) e contou com a parceria da AACD (Associação de Assistência à Criança Deficiente), em São Paulo.
"Após 17 meses de trabalho científico intenso e centenas de horas de testes clínicos realizados em um laboratório localizado na cidade de São Paulo, Brasil, o projeto Andar de Novo anuncia oficialmente a conclusão dos objetivos científicos, clínicos e tecnológicos desta sua primeira fase", disse Nicolelis.
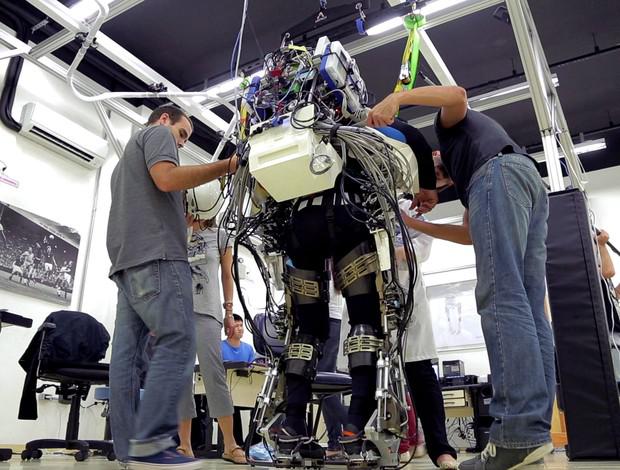 Feito foi um marco para as tecnologias assistivas. (Foto: AFP).
Feito foi um marco para as tecnologias assistivas. (Foto: AFP).
Entenda o experimento
A primeira etapa do projeto consistiu no desenvolvimento da chamada interface cérebro-máquina, uma tecnologia que possibilitasse a leitura de sinais elétricos produzidos por neurônios do cérebro e a captura, a partir desses sinais, de um controle motor que pudesse ser usado pelo traje. Depois foi necessário mandar os sinais de volta do robô para o cérebro, fechando assim o ciclo de controle.
Testes desse primeiro protótipo foram concluídos com sucesso no último dia 28 de maio. O exoesqueleto, sobre comando da atividade cerebral de um operador, realizou movimentos considerados naturais e fluidos roduzindo a sensação de que eles estavam caminhando com as próprias pernas.
As pesquisas para o seu desenvolvimento começaram em 1999. O trabalho de robótica foi coordenado por Gordon Cheng, da Universidade Técnica de Munique, em colaboração com uma equipe de engenheiros e pesquisadores. O sistema foi desenvolvido na França e testado no Brasil.
Para que o ato de caminhar seja o mais próximo da realidade, é importante que o paciente tenha também restabelecida a sensação tátil nos membros paralisados. Para isso, foi desenvolvido uma tecnologia de feedback tátil, ou pele artificial. Essa pele é formada por placas flexíveis de circuitos integrados, cada uma delas contendo sensores de pressão, temperatura e velocidade. Ela é aplicada na planta dos pés para que o paciente, ao andar com o exoesqueleto, receba, a cada toque dos pés no chão, um estímulo tátil enviado a uma região da parte superior do corpo, como os braços.
Os primeiros testes clínicos do grupo de oito pacientes começaram a ser realizados em janeiro de 2014, no laboratório AASDAP/AACD, inaugurado em novembro de 2013 em São Paulo.
A iniciativa de hoje foi tida como uma apresentação da pesquisa e não faz parte do estudo científico. Segundo o consórcio, "o objetivo é aproximar a ciência da população brasileira e de todo o mundo".
Atualizado com o nome do voluntário para usar o traje, Juliano Pinto, 29 anos.
